

Posted by Josh Elijah on 11th Nov 2024
BotBlox ARIES Switch Management Software
BOTBLOX ARIES IS NOW DEPRECATED AND HAS BEEN REPLACED WITH BLOXOSLITE.
Full documentation on BotBlox ARIES software can be found below:
BotBlox ARIES Software Documentation
BotBlox enters the software game
BotBlox's ethernet products have become heavily used in drone and embedded applications, but increasingly such applications need more sophisticated ethernet switches that can segregate, mirror and manage traffic.
For a long while, switch management has actually been possible on our hardware but it was not an easy task because it meant customising and uploading firmware manually. This was made ever harder by the fact that our boards are tiny, meaning connectors are fiddly and difficult to keep in place.
This has meant that the majority of our customers are using our products purely as unmanaged ethernet switches to provide basic ethernet backbones in embedded applications.
That is about to change though, with the release of the BotBlox ARIES (Active Register Interface for Ethernet Switches) Software, a new GUI that allows configuration the switch behaviour via a user friendly GUI.

How does it work?
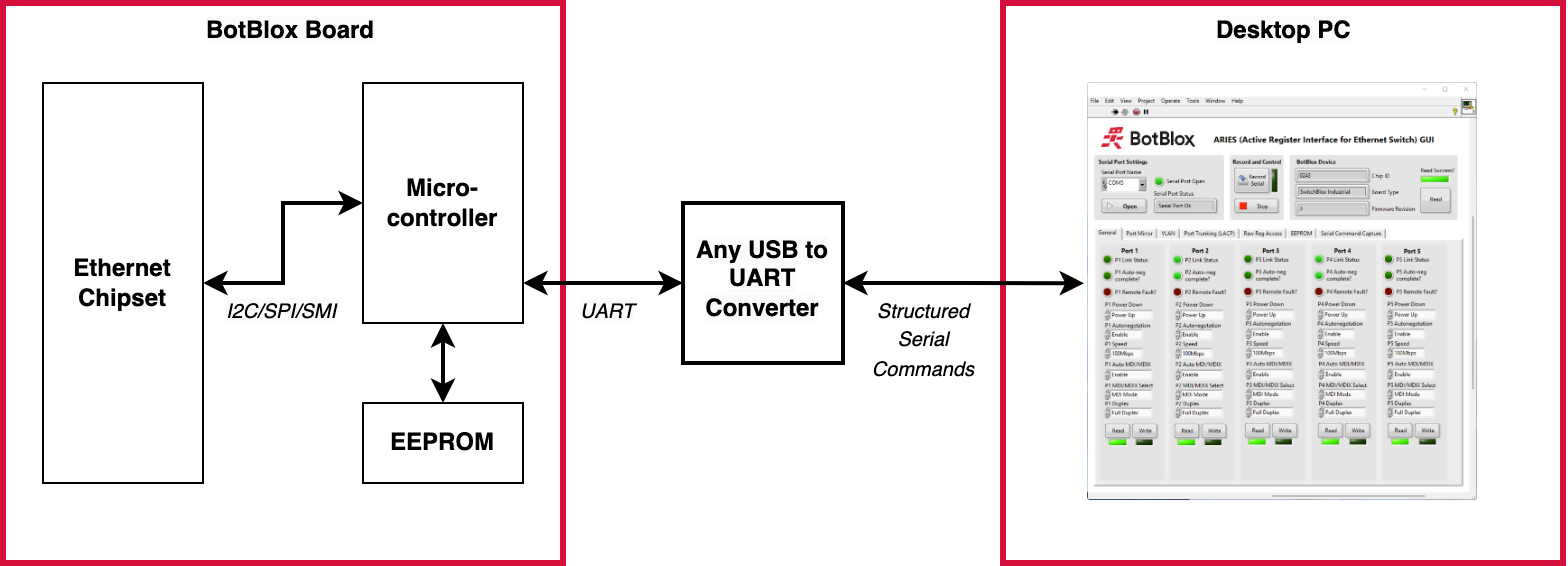
ARIES Software (Active Register Interface for Ethernet Switches) consists of firmware running on the BotBlox device, and a .exe application running on any Windows machine. The firmware running on the BotBlox device is designed to receive specific UART commands which are then parsed and translated into the low-level commands necessary to configure the ethernet chipset on the board.
The GUI runs on the Windows machine, and generates the correct UART commands based on the user input selected. This requires the use of an external USB to UART converter to connect between the BotBlox device and the computer, but such converters are ubiquitous and cheap.
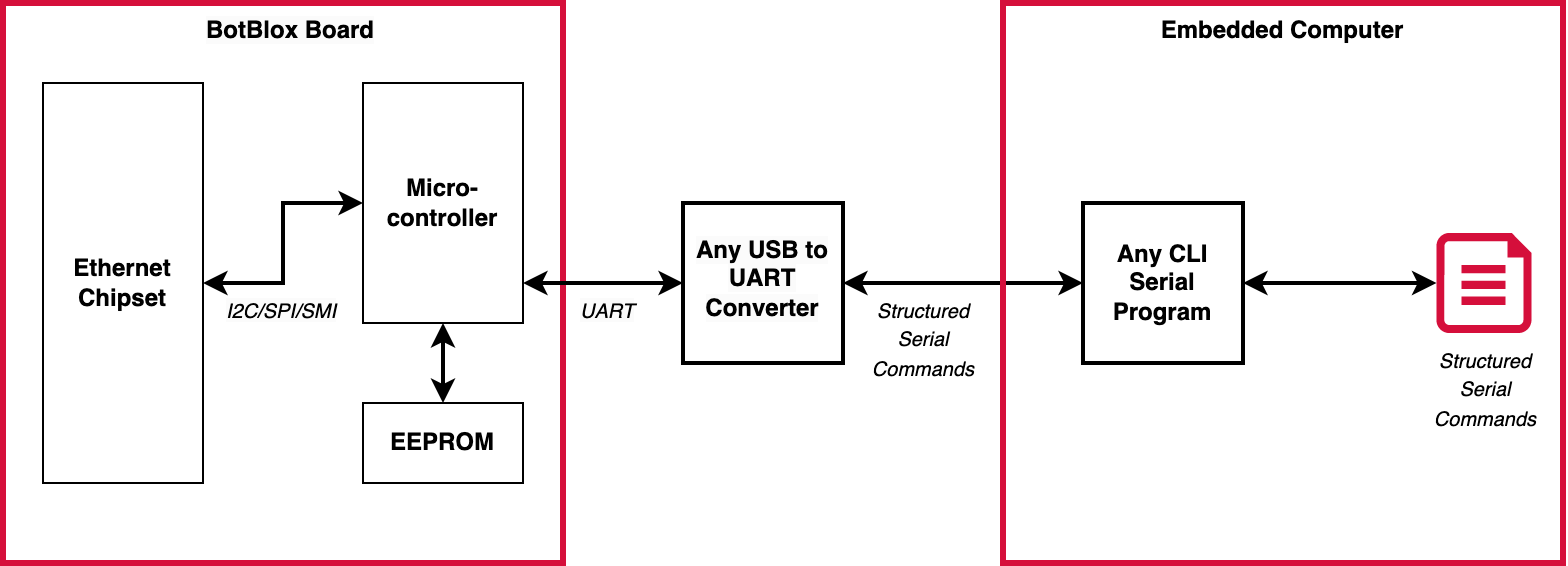
In many cases, our customers will want to control and configure our hardware with an embedded PC (like a Raspberry Pi), rather than with a desktop. To support this, the ARIES software can run in a command record mode, where the serial commands it sends/receives from the BotBlox board are stored and can be exported to a text file. The serial commands stored in this text can then be sent/received to/from the BotBlox board by any CLI based serial program running on the embedded device.
Board compatibility
Our first release of the BotBlox ARIES software will support only SwitchBlox Industrial, and all SwitchBlox Industrial boards will be shipped with our new ARIES firmware. This does not change the functionality of the board in an unmanaged application, but it will allow the board to work with the ARIES software if switch management is required.
Features and functions
Our first release will support the following switch management features on SwitchBlox Industrial
- Port status, Speed/Duplex/MDIX setting
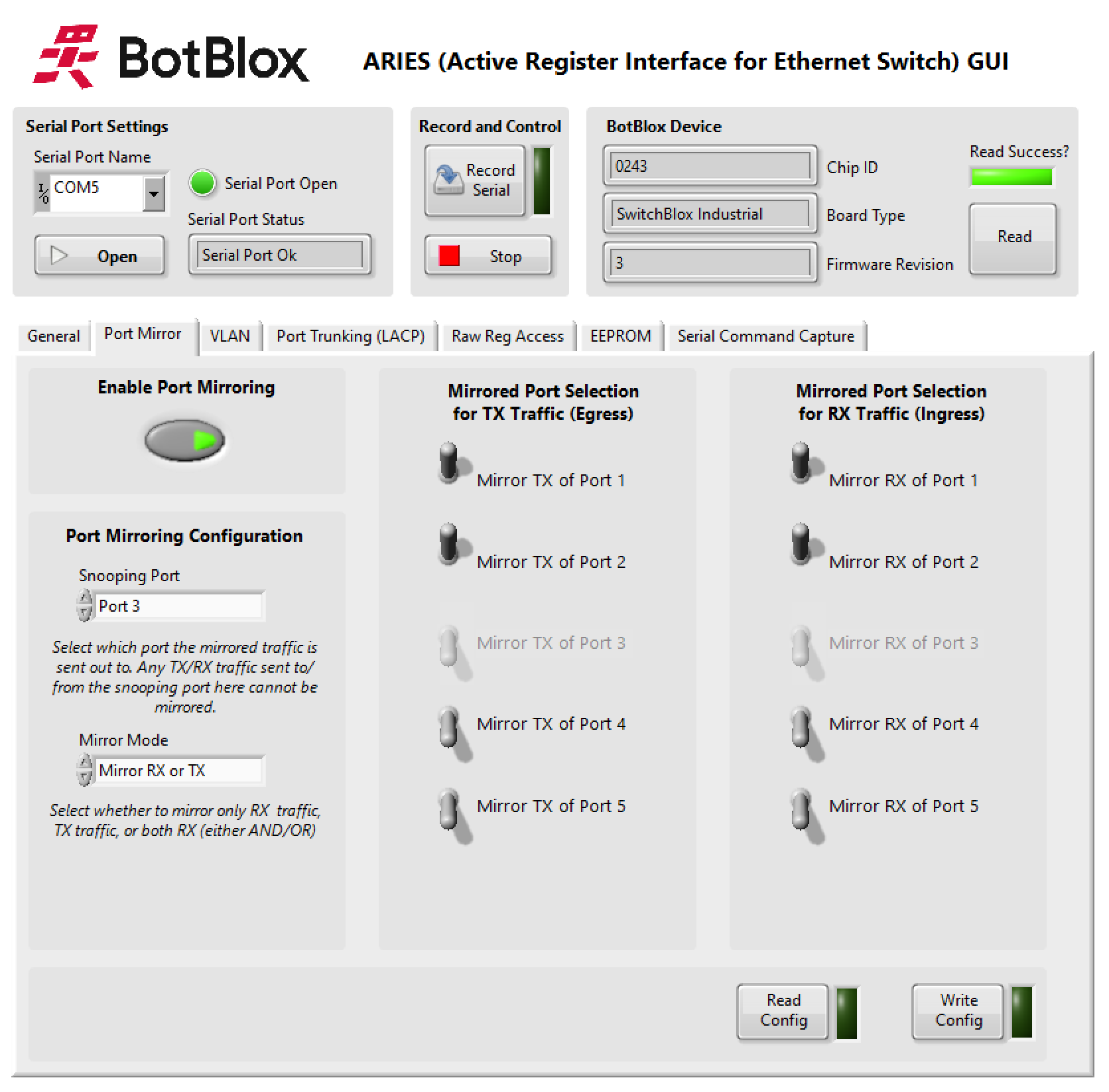
- Port Mirroring (RX, TX or RX and TX)
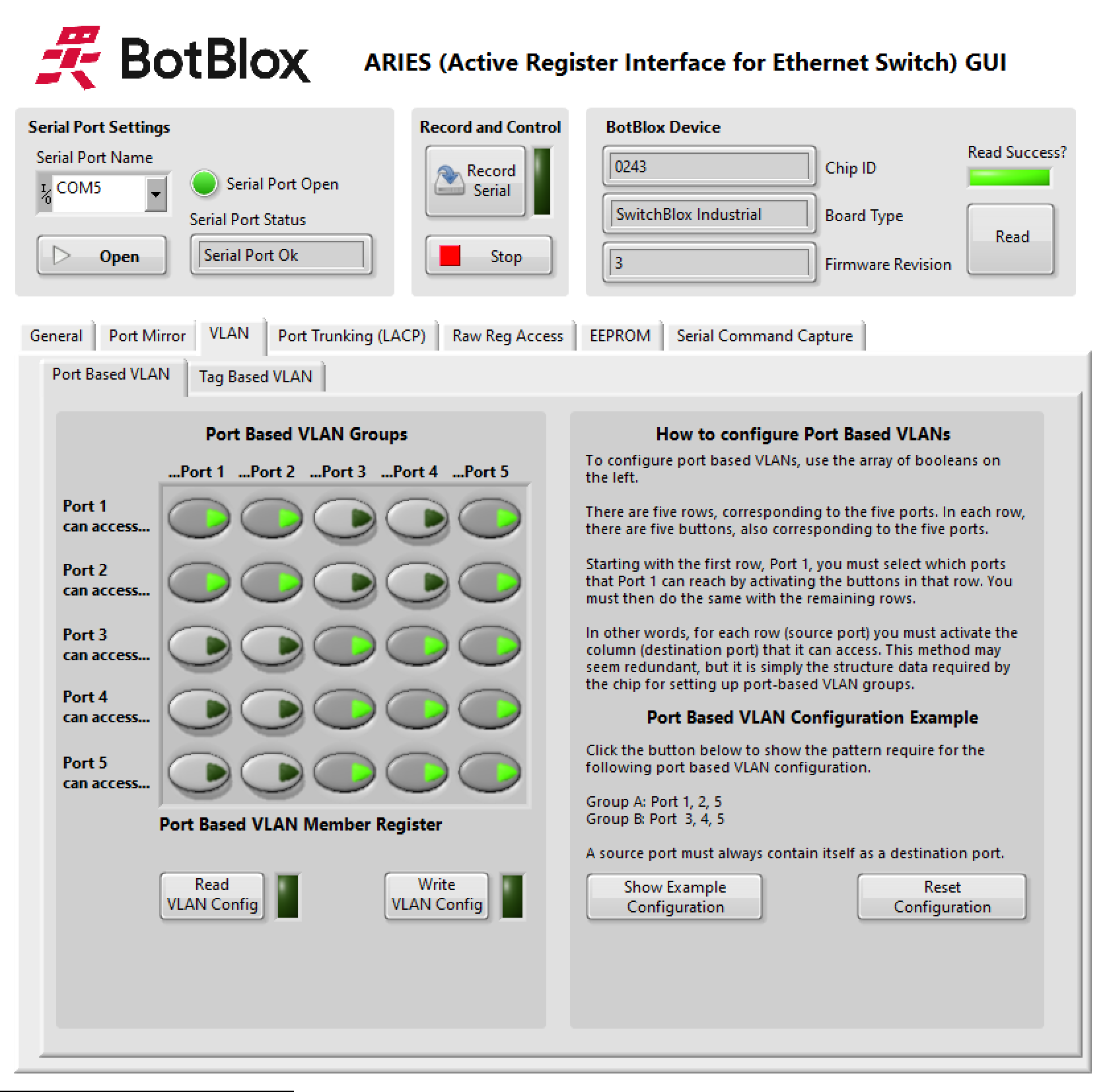
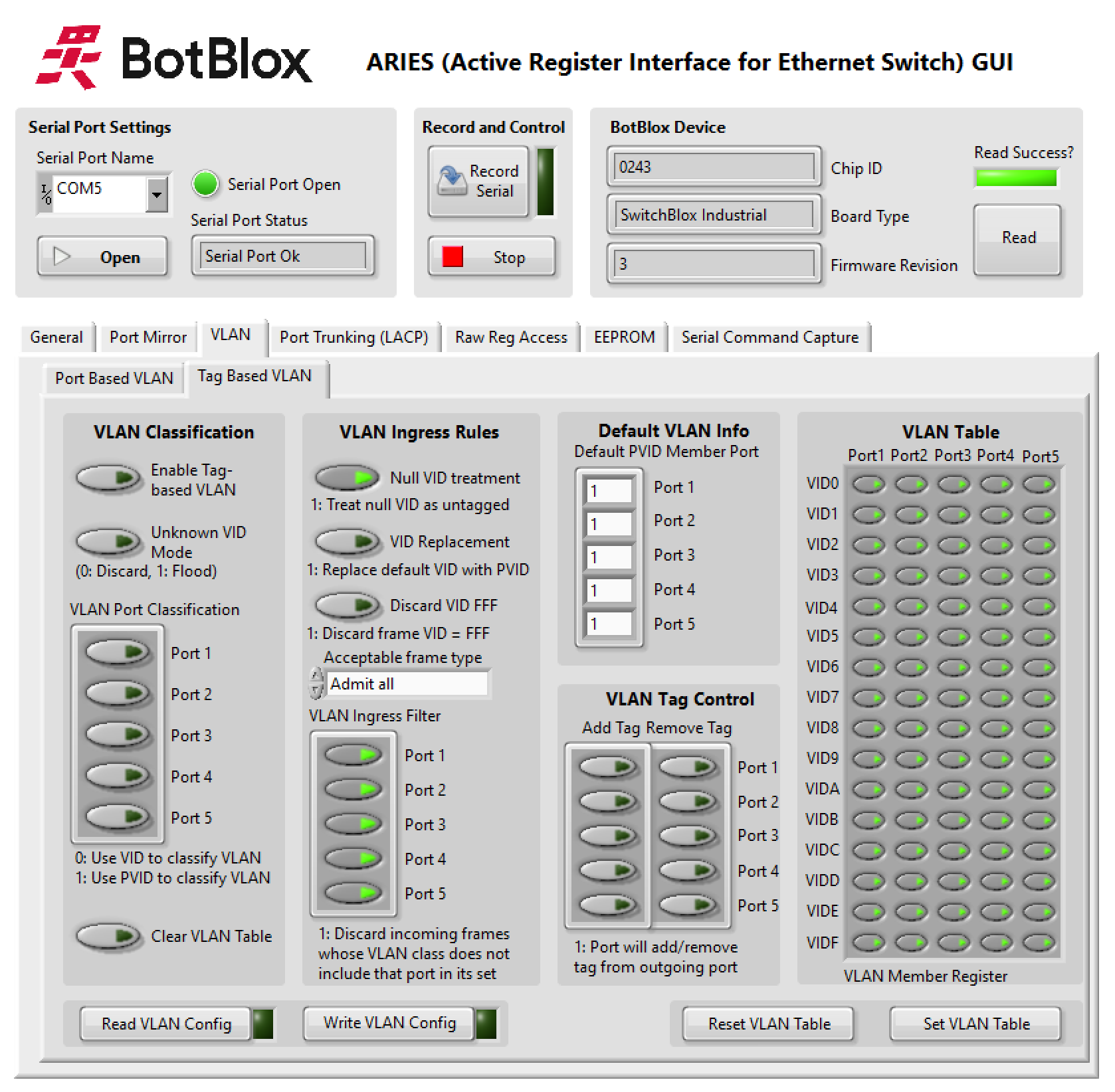
- VLAN Setup(Port and Tag based, including VLAN trunking (IEEE 802.1Q)
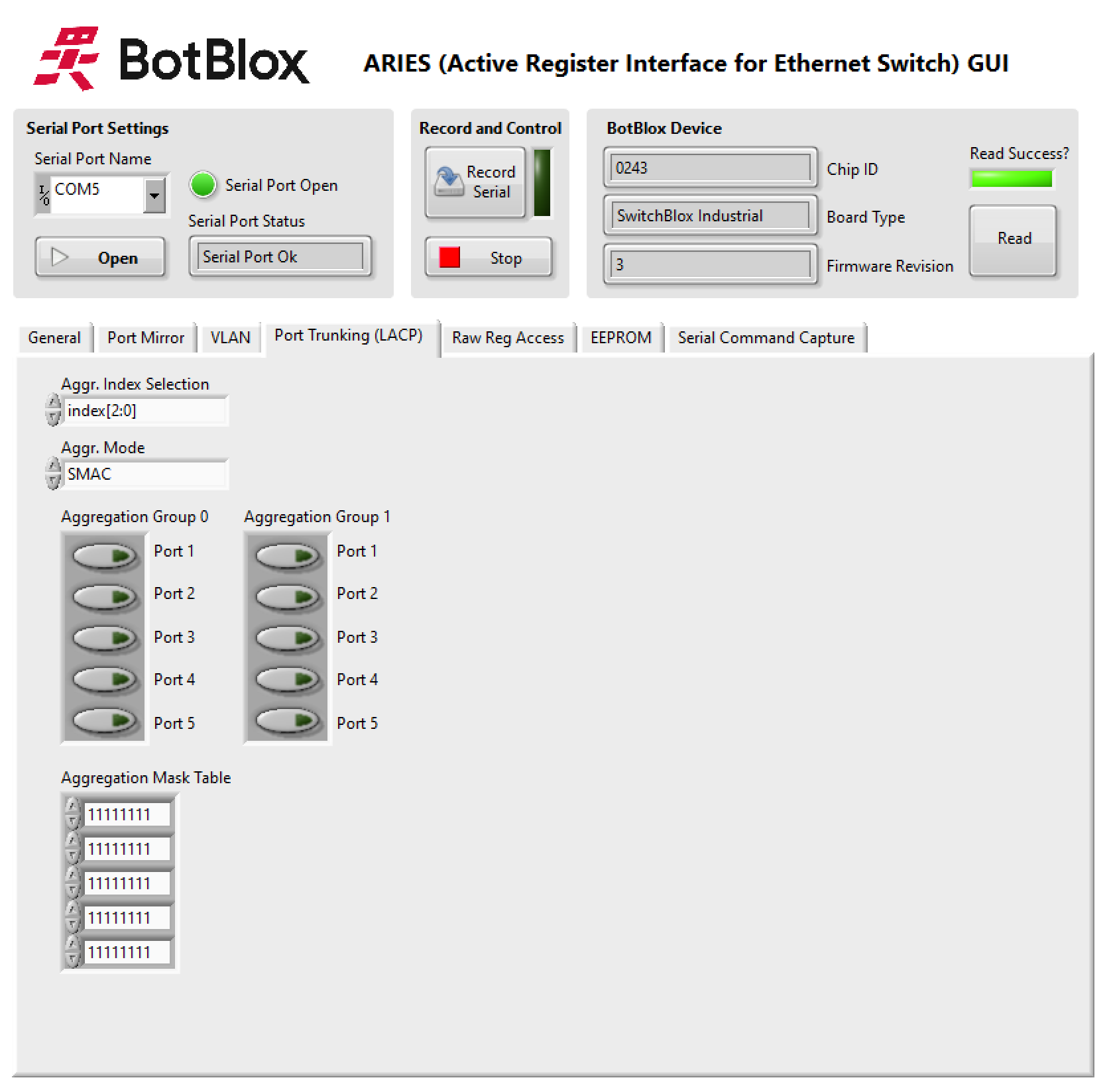
- Port Trunking (Aggregation, LACP)
- Set once and forget (the firmware can retain the setting between power-ons)
- Export of raw serial commands for use in a headless application with the GUI
Port Management
Port Mirroring Setup
Port-based VLAN Setup
Tag-based VLAN Setup
Port Trunking (LACP) Setup
Future releases
The first version of the ARIES software will only support SwitchBlox Industrial, but we will be rolling out support for more of our boards in future. The software will be released in mid January 2023
Support is only possible on our boards that contain a microcontroller, which rules out most of the Standard Series of our boards. UbiSwitch will be the next board to be supported, which will allow a vastly expanded set of features including PTP, QoS, ToS, DiffServ and AVB/TSN.
A full software manual and tutorial will be released in due course. We would welcome your comments and feedbacks to help us define the next features for this software!